Researchers from the Indian Institute of Technology Gandhinagar (IITGN) have introduced a novel control framework based on the concept of virtual actuation space (VAS), marking a significant advancement in the control of flexible continuum robots.
The proposed virtual actuation space framework for Tendon-driven Continuum Robots (TDCRs) is designed to simplify complex robotic motion, reduce computational demands, and enhance tracking precision, thereby unlocking new possibilities in surgical robotics and industrial automation.
The concept of virtual actuation space addresses one of the most persistent challenges in continuum robotics—managing the infinite degrees of motion in flexible robotic systems.
The findings, recently published in Robotica, demonstrate how the virtual actuation space framework can efficiently handle multi-section robots while maintaining high levels of accuracy and control.
Also Read: Mirai Robotics Raises $4.2M to Develop AI Robotics for Maritime Surveillance and Patrolling
Addressing Limitations of Traditional Robots
Traditional robots are typically designed with rigid arms, rotating joints, and fixed mechanical movements. While effective in structured environments, these robots face limitations in confined or delicate spaces.
In applications such as minimally invasive surgery, where navigation through soft tissues and sensitive organs is required, rigid robots can pose risks due to their limited flexibility.
Continuum robots (CRs), by contrast, are designed with flexible bodies that allow them to maneuver smoothly through constrained environments.
Among these, Tendon-driven Continuum Robots (TDCRs) stand out for their compact structure, lightweight design, and cost-effectiveness. These robots operate using thin tendons attached to a flexible backbone, enabling them to bend and adapt their shape dynamically.
However, controlling TDCRs remains a complex task due to their ability to bend in infinitely many ways, especially when multiple sections are involved. This is where the virtual actuation space framework plays a transformative role.
Simplifying Control with Virtual Actuation Space
The virtual actuation space framework simplifies the control architecture by introducing an abstract representation of the robot’s motion. Instead of directly manipulating individual tendons, the system enables independent control of different robot sections through a simplified model. This significantly reduces the computational burden and enhances the precision of movement.
Explaining the challenge, Dr Madhu Vadali, Associate Professor in the Department of Mechanical Engineering and co-head of the IITGN Robotics Lab, said, “While a rigid robot may have a fixed number of joints that would limit its movement, a TDCR can bend in infinite ways. The situation is further complicated by its multiple sections.”
By leveraging virtual actuation space, researchers can effectively manage this complexity, enabling smoother and more accurate control of multi-section robots.
Experimental Validation and High Precision
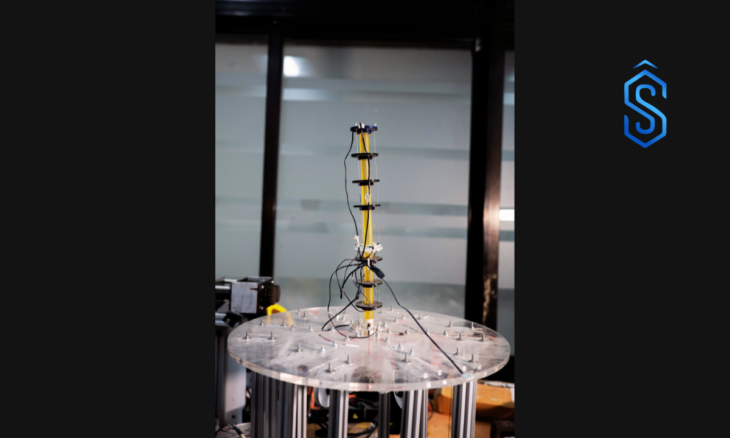
To evaluate the effectiveness of the virtual actuation space framework, the research team developed a robotic arm with two sections and six tendons.
The experimental setup included LED markers to track the robot’s movement using a camera system. A computer then compared the robot’s actual position with its desired position and adjusted motor inputs accordingly.
According to Md Modassir Firdaus, a PhD scholar, and Dr Shail Jadav, a former PhD scholar and current postdoctoral research fellow at the Technical University of Vienna, “To estimate this method’s effectiveness, we developed a robotic arm with two sections having six tendons. Small LED markers allowed a camera to track the robot’s position. Later, a computer compared the actual position with the robot’s desired position and adjusted the attached motors accordingly.”
The results demonstrated an error margin of less than one per cent in movement tasks, highlighting the remarkable precision enabled by the virtual actuation space framework. Additionally, the robot’s sections were able to operate independently, offering greater flexibility in task execution.
Also Read: NTT DATA Launches GCC Innovation Acceleration Program to Support 50 Global Companies in India
Expanding Applications Across Industries
The scalability of the virtual actuation space framework allows it to be extended to robots with additional sections, further broadening its application scope.
This advancement is expected to play a critical role in areas such as minimally invasive surgical procedures, industrial automation, and inspections in confined environments like aircraft engines.
By enabling precise control in complex environments, the virtual actuation space concept opens new avenues for robotics applications where traditional systems fall short.
Alignment with India’s Robotics Vision
This research aligns closely with India’s National Strategy on Robotics, which aims to position the country as a global leader in robotics by 2030. It also supports the objectives of Make in India 2.0, where robotics has been identified as a key sub-sector for strengthening India’s integration into the global value chain.
Reflecting on the broader vision, Dr Vadali stated, “At IITGN, we have built an enthusiastic and engaging culture surrounding robotics. Robotics is becoming a domain where curiosity drives cutting-edge and societally-relevant innovation.”
Patent Filing and Acknowledgements
The research team has filed a patent (number 202421002550) with the Office of the Controller General of Patents, Designs and Trade Marks, Government of India, for the virtual actuation space framework.
The study received financial support from the Gujarat Council on Science and Technology, and the researchers also acknowledged valuable feedback from the IITGN Robotics Lab team.